Comme vous avez pu le comprendre dans les précédents articles,
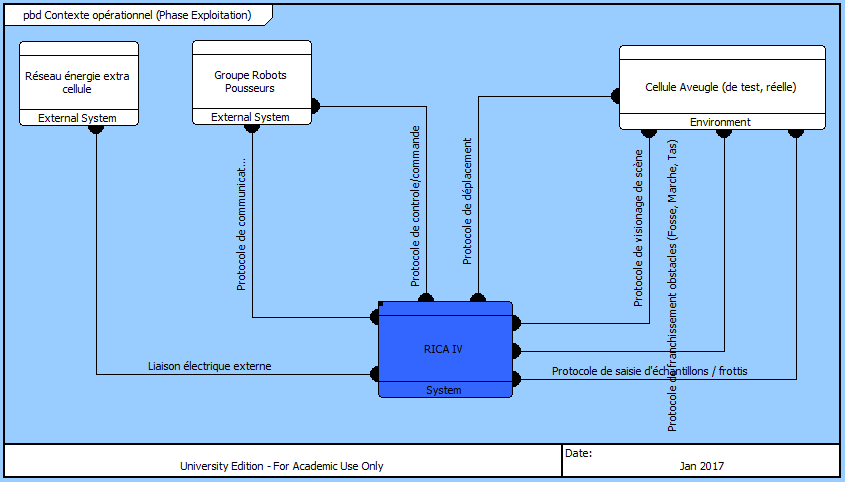
le robot RICA IV a pour objectif d’investiguer et d’intervenir dans des
cellules aveugles. Avant de le livrer
notre prototype de RICA à notre client, le CEA, il devra passer des
qualifications. Pour cela, nous allons créer une cellule de test.
La cellule 55
A la demande du client,
nous devons reproduire une cellule aveugle déjà existante et sur
laquelle des interventions ont déjà été menées, la cellule 55. Le CEA a déjà récolté plusieurs informations
sur cette cellule, comme la présence d’huile sur le sol ce qui pose des
problèmes d’adhérence ou encore la présence d’une fosse au niveau de l’entrée
de la cellule. Il faut savoir que le CEA a obtenue ces informations en
cartographiant la cellule depuis le haut et depuis l’entré de la cellule. Ils
n’ont pas pu accéder à l’intérieur de la cellule car le RICA III n’était pas
capable franchir la fosse et donc risquait de devenir un déchet si la tentative
de franchissement échouait.
Ci-dessous, vous pouvez voir les photos prises de la cellule
par le CEA :

Entrée de la cellule

Schéma vue de côté de la cellule 55
Notre banc de test
Afin de tester notre RICA IV, nous avons décidé d’apporter
quelques modifications à la cellule 55.
Il faut savoir que de nombreux obstacles sont nécessaires à la
validation de notre cahier des charges et la plupart ne sont actuellement pas
présents dans cette cellule. Par exemple, aucun escalier n’est présent hors
c’est le principal objectif de notre RICA IV.

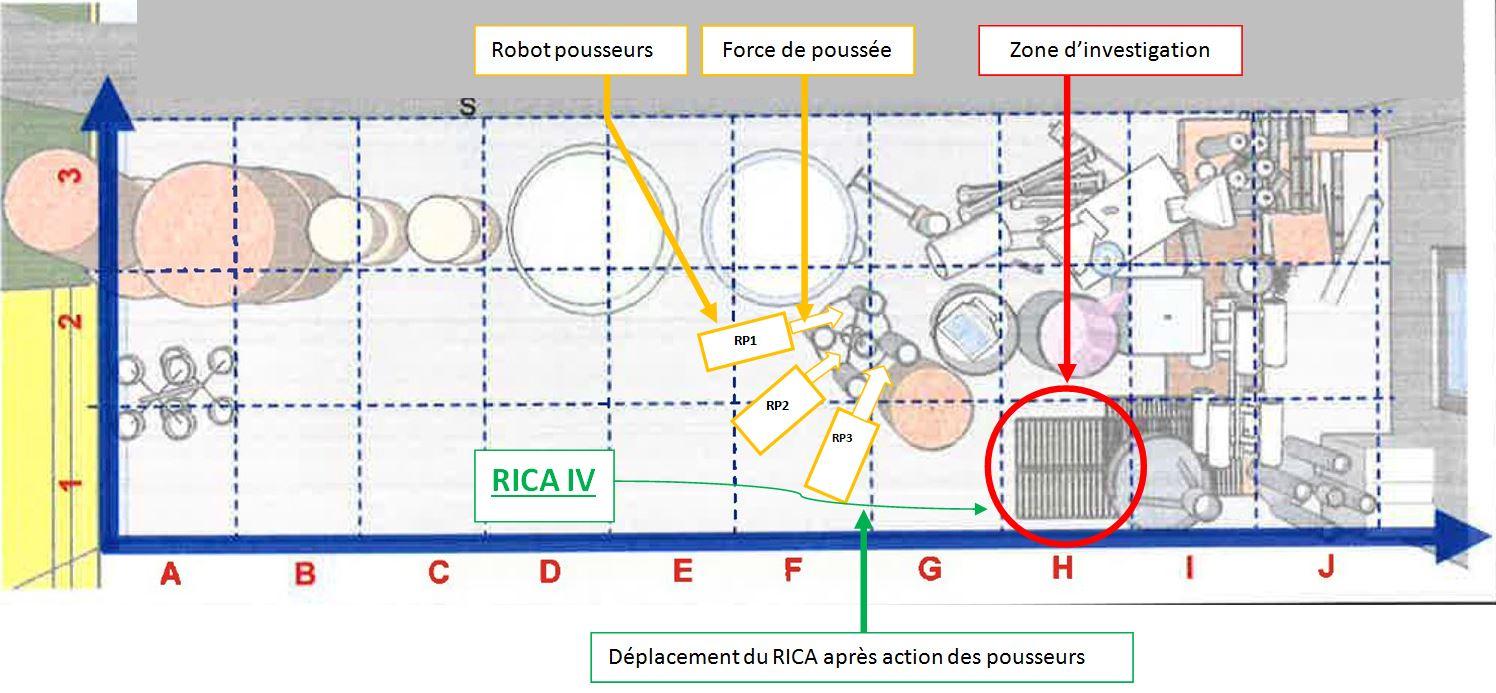
Banc de test
Comme vous pouvez le voir sur l’image ci-dessus, nous avons
rajouté de nombreux obstacles qui seront modulables. Pour le test d’adhérence,
nous avons suggéré que la pente et le type de matériau soit modifiable. Nous
pourrons donc définir les limites d’adhérence de notre RICA IV sur différentes
matières et déterminer jusqu’à quel angle nous avons encore le contrôle sur
celui –ci.
Il faut savoir que sur ce banc de test, les tests liés à la
résistance aux radiations ne seront pas effectués. Notre banc de test sera
construit dans l’enceinte de l’école, une source de radiation serait donc
dangereux à mettre en place. De plus, nous ne sommes pas assez qualifiés pour
valider ce type de test alors que le CEA est un expert.
Pour conclure, cette cellule de test devrait être construite
après la fin de nos études, nous ne pourrons donc pas assister aux tests
complets de notre prototype. Mais nous réaliserons la conception entière de
cette cellule.