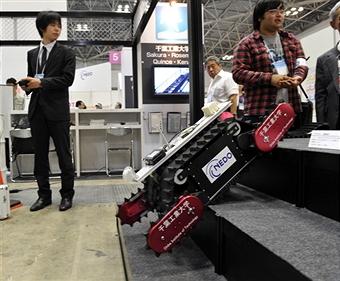
Toute la partie motorisation est cruciale dans la conception du
prototype du RICA, plus précisément les bras puisque sans eux le franchissement
d’obstacle en devient alors impossible. Pour l’étude de notre prototype, nous
avons estimé que l’ensemble des composants ferait une masse totale de 30 kg.
Donc dans le but de limiter les prix et le dimensionnement de notre système.
Nous allons utiliser des moto-réducteurs à courant continu ayant
une tension d’alimentation de 24V pour des raisons de praticités.

Moteurs d’entrainement (4&1) :
Dans le
cadre de la motorisation des chenilles principales, afin de dimensionner nos
moteurs, il faut se placer dans le cas le plus défavorable que l’on pourrait rencontrer.
Nous avons décidé de dimensionner nos moteurs dans le cas où le prototype du
RICA devrait franchir un escalier avec comme longueur de marche 28 cm et une
hauteur de marche de 30 cm. Cela revient à monter une pente de 47° lorsque le
robot a ses appuis à l’avant et à l’arrière en contact avec les marches. Pour
notre étude nous avons arrondi à 50° ce qui nous permet de nous rajouter plus
de sécurité.

Sans oublier que nous
devons garantir une vitesse de déplacement du robot de 5m/min ce qui impose
une vitesse de rotation en sortie d’arbre moteur.
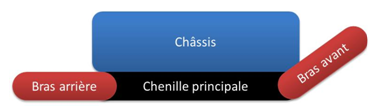
Moteurs des flippers (2&3) :
La
motorisation des bras de notre prototype va être importante puisque sous
dimensionné il risque de ne plus répondre aux besoins et donc de ne plus être
capable de franchir les obstacles.

Nous
avons décidé de dimensionner les moteurs des bras dans le cas où il devrait
franchir un escalier.
Le couple
maximal à vaincre peut se calculer lorsque les bras du robot, dans notre cas
ceux à l’avant, forme un angle de 0 degré avec le corps du robot (les chenilles
principales).
Un simple
calcul de bras de levier nous aurait permis de calculer le couple résistant
permettant de rester dans cette position.
Cependant,
ce n’est pas suffisant pour franchir la marche puisque lors du déplacement, il
y aura une force d’inertie liée à l’accélération du robot en plus. Afin
d’obtenir ce couple maximal, nous avons décidé de simuler le franchissement de
l’obstacle en réalisant une modélisation sur CATIA V5 et d’étudier le système
de manière analytique avec Sim Designer.

Suite à cette simulation
nous obtenons directement dans les variables observables l’évolution du couple nécessaire
dans la liaison pour réussir le mouvement.
Ainsi, à l’aide de
calculs analytiques ou de simulations, il nous a été possible de déterminer les
moto-réducteurs à implémenter sur notre robot pour que ce dernier réponde au
cahier des charges.