Dans le cadre de notre formation d’ingénieur mécatronique par apprentissage, nous avons eu l’occasion de travailler sur un projet de robot pousseur. Ce projet académique s’inscrit dans le cadre du projet fil rouge qui rappelons le, consiste à améliorer un robot d’investigation de cellule aveugle (RICA III).
Mais qu’est-ce qu’un robot pousseur ?
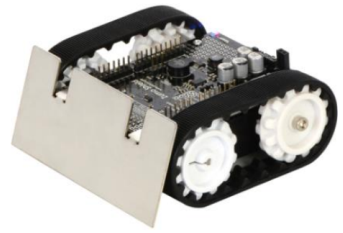
Un robot pousseur n’est en fait qu’un simple robot de type sumo mais dont la fonctionnalité principale a été détournée. Un robot sumo est un petit robot motorisé comprenant une carte électronique programmable. Son but à l’origine, comme son nom l’indique est d’être en compétition contre un autre robot sumo et de l’éjecter hors d’un cercle à l’aide de son châssis.
Dans notre cas, l’objectif n’est pas d’éliminer un concurrent mais de déblayer un chemin avec ce même châssis.
Lors d’une mission d’investigation en cellule aveugle, la configuration des différents robots serait la suivante : plusieurs robots pousseurs forment un essaim devant/autour du RICA (voir image ci-dessous). Dès lors que cette configuration est mise en place, l’objectif des robots pousseurs est de déblayer le chemin pour laisser le RICA progresser en cellule aveugle. L’ajout de ces robots pousseurs permettrait de limiter les différents risques qui compromettraient la mission principale : recueillir des informations (radiologique, typographique, etc…) de la cellule à investiguer.
Ci-dessous une représentation schématique de la configuration en question.
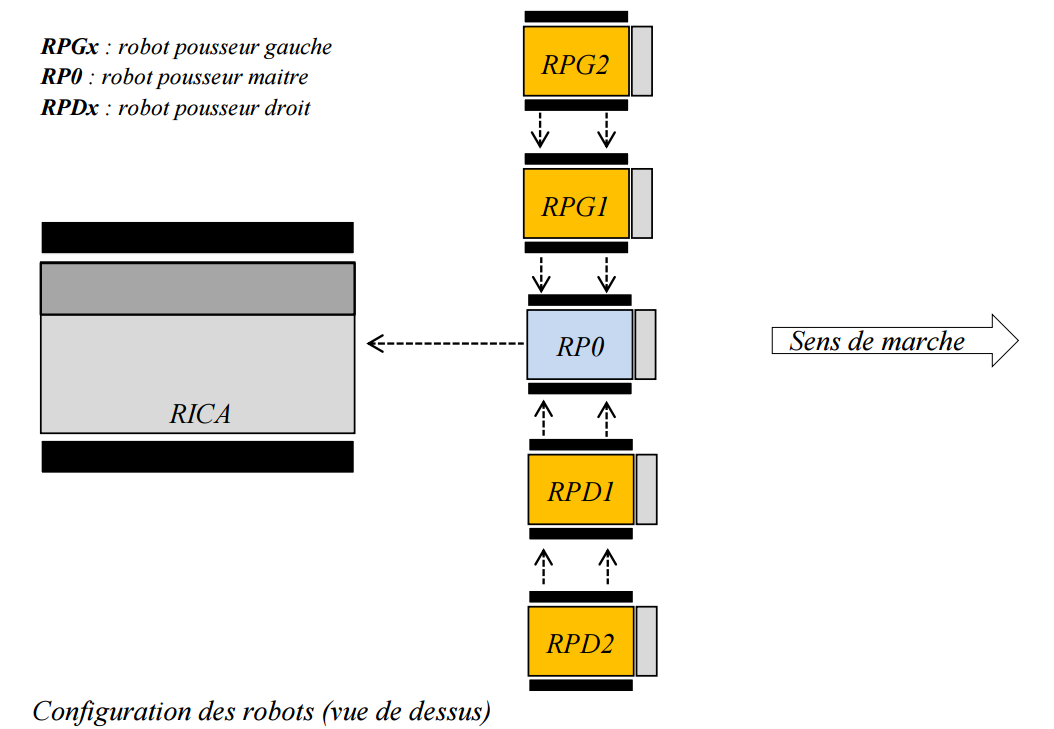
Les fonctionnements attendus peuvent être décrit suivant trois modèles, c’est-à-dire selon la position du robot au sein de l’essaim :
- Notre robot pousseur se trouve à la place du RP0 : le robot pousseur doit suivre directement les mouvements du RICA.
- Notre robot pousseur se trouve en RPGx : le robot pousseur doit suivre les mouvements du premier robot pousseur à sa droite.
Ex : RPG2 suit les mouvements du RPG1 qui lui-même suit les mouvements du RP0 suite à un mouvement du RICA.
- Notre robot pousseur se trouve en RPDx : le robot pousseur doit suivre les mouvements du premier robot pousseur à sa gauche.
Ex : RPD2 suit les mouvements du RPD1 qui lui-même suit les mouvements du RP0 suite à un mouvement du RICA.
Dans l’idéal, chaque robot pousseur doit pouvoir gérer ces trois modes de fonctionnement.
Vous l’aurez sûrement compris, contrairement au RICA qui lui est piloté, les robots pousseurs fonctionnent en parfaite autonomie. On pourrait dire ici que ces différents robots sont asservis aux mouvements du RICA, c’est-à-dire qu’ils sont dépendants de ce dernier.
Afin de pouvoir réaliser ce projet, nous avions à disposition un kit de robot Sumo. Celui-ci comprenait différents éléments dont une carte programmable Arduino nous permettant de programmer les différents modes de fonctionnement. Nous avions également différents capteurs avec des caractéristiques différentes. Ces éléments seront détaillés au cours du prochain article à savoir « Robot Pousseur : Partie 1 Hardware » et suivra par la suite un troisième article : « Robot pousseur : Partie 2 Software ».