Qu’est-ce que le multiplexage ?
La fonction multiplexage est le fait d’envoyer sur une même ligne de transmission des informations provenant de plusieurs sources.
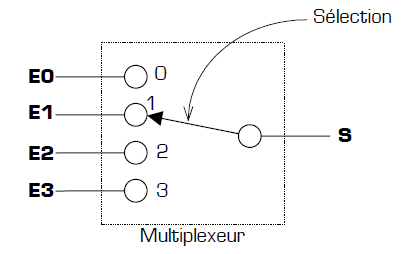
Dans cet exemple, le multiplexeur a 4 entrées logiques E0, E1, E2 et E3, et une sortie logique S. En fonction de la sélection, une des 4 entrées se retrouvera à la sortie du multiplexeur :
- Si la sélection est placée en position 0, la sortie prend l’état logique de l’entrée E0
- Si la sélection est placée en position 1, la sortie prend l’état logique de l’entrée E1
- Si la sélection est placée en position 2, la sortie prend l’état logique de l’entrée E2
- Si la sélection est placée en position 3, la sortie prend l’état logique de l’entrée E3
Qu’est-ce que le démultiplexage ?
La fonction démultiplexage est le fait d’envoyer sur plusieurs lignes de transmission des informations provenant d’une seule source.

Dans cet exemple, le démultiplexeur a 1 entrée logique E, et 4 sorties logiques S0, S1, S2 et S3. En fonction de la sélection, les informations présentes sur l’entrée du démultiplexeur se retrouvent sur l’une des sorties :
- Si la sélection est placée en position 0, l’état logique de l’entrée E se retrouve sur la sortie S0
- Si la sélection est placée en position 1, l’état logique de l’entrée E se retrouve sur la sortie S1
- Si la sélection est placée en position 2, l’état logique de l’entrée E se retrouve sur la sortie S2
- Si la sélection est placée en position 3, l’état logique de l’entrée E se retrouve sur la sortie S3
Quel rapport avec le RICA ?
Comme signalé dans les articles précédents, le robot RICA est un robot d’investigation. Afin de remplir pleinement sa mission, les données mesurées doivent être transférer le plus efficacement possible au poste de téléopération. Pour cela le CEA a mis au point un système de multiplexage/démultiplexage. Les paragraphes suivant vont vous expliquer la raison et l’utilité de ce choix techniques.
Lors de ces interventions le robot RICA est alimenté par un câble que l’on appelle « Ombilic ». Ce câble permet également d’envoyer les mesures et informations capturées par le robot et de recevoir les ordres liés au déplacement, à l’éclairage et au choix des caméras. Il n’y a donc qu’une seule voie d’accès pour les informations. Or pour faciliter le traitement des informations, ces dernières doivent être acheminées entre différents postes. En effet en fonction des mesures que l’on effectue, le traitement nécessitera une configuration spécifique des ordinateurs. De plus il est a noté que le RICA doit recevoir et envoyer des informations à la mallette de commande.
Un système de multiplexage/démultiplexage, avec plusieurs prises permettant de changer les entrées/sorties du système plus facilement, fut installé dans un coffret. Chaque système intervenant dans le traitement des informations y sera connecté et possédera une adresse permettant de l’identifier. Ainsi les pilotes peuvent pleinement se concentrer sur le robot et son environnement, évitant ainsi des erreurs de manipulation.
Le schéma ci-dessous représente un exemple de branchement sur le coffret de multiplexage/démultiplexage lors d’une intervention.

Pour la montée en gamme du RICA, le CEA souhaite garder le coffret de multiplexage/démultiplexage. Il faudra donc prendre en compte les caractéristiques de ce coffret lors de la conception du nouveau robot.
Aucun commentaire:
Enregistrer un commentaire