Si le projet « Robots pousseurs » n’a pour l’instant qu’un aspect pédagogique, ce concept pose une réelle problématique industrielle. Les solutions technologiques que nous avons proposés au C.E.A ont suscité une réflexion et vont sûrement être le sujet de futures recherches. Mais que pense réellement le C.E.A de ce projet qui est né dans notre plateforme mécatronique ? Comment va t-il utiliser le concept des « robots pousseur » ?
La collaboration en essaim
L’une des parties les plus importantes du projet est la collaboration intelligente des robots pousseurs. Comme les abeilles d’une ruche, les robots devront être capables de se coordonner en temps réel pour réaliser un objectif commun. Cela permettra à RICA IV de se servir des robots pousseurs comme outil pour déplacer, franchir ou se débarrasser d’un obstacle dans une cellule aveugle.

Obstacle gênant dans une cellule aveugle
Exemple de scénario n°1 - Déplacement d’objet dans la cellule aveugle
Objectif : Pousser les objets gênant la trajectoire de RICA IV
Imaginons le RICA IV et sa flotte de robot pousseurs à l’intérieur d’une cellule aveugle en pleine investigation. Le sol est jonché de débris en tout genre (pièces de métal, tuyau coupés …). Le RICA est bloqué à 80 cm d’un objet à analyser par un tuyau d’acier. Avec les robots pousseurs, l’opérateur pourrait envoyer l’ordre à l’essaim de déplacer l’obstacle. Une fois l’objet dégagé, il reprend le contrôle du RICA IV pour continuer ses investigations.
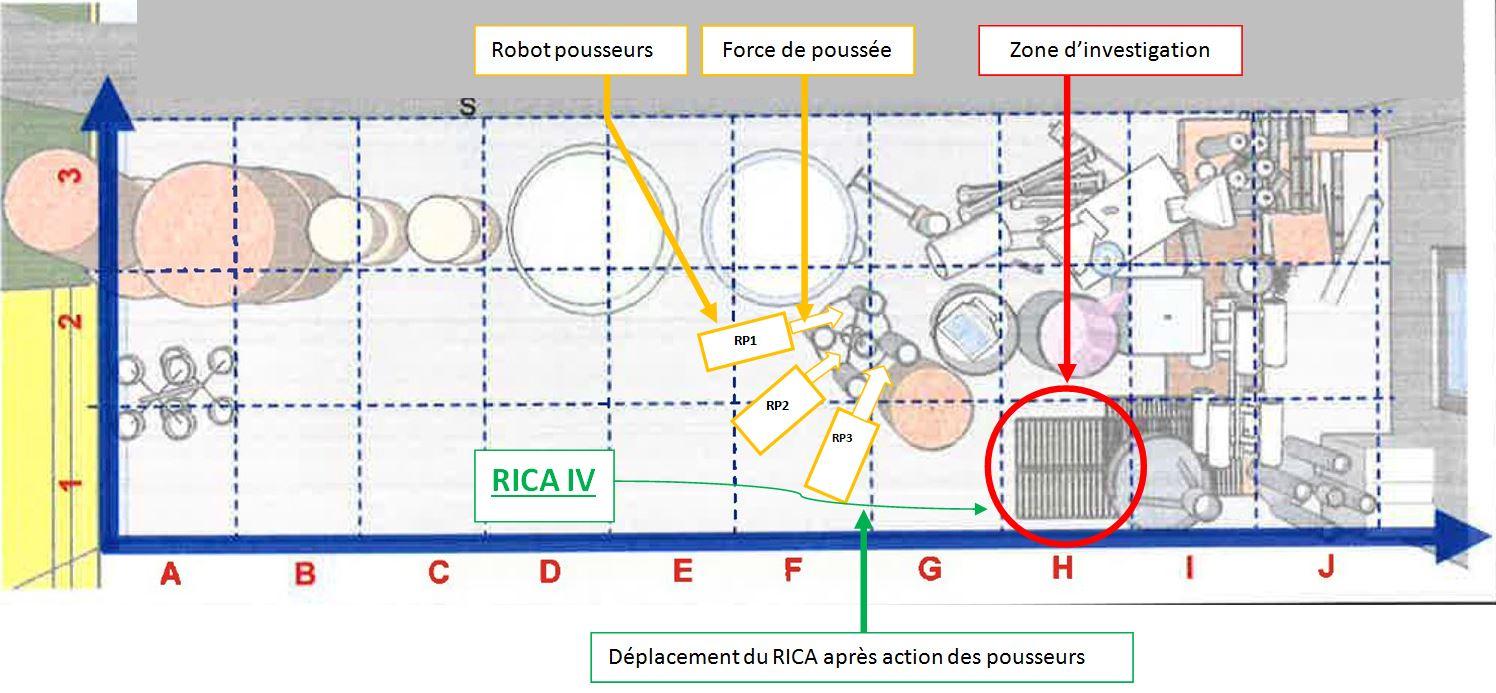
Schéma du scénario n°1 – Dégagement d’obstacle
Scénario 2 - Franchissement d’obstacle
Objectif : Débloquer le RICA et ses équipements dans les situations critiques
Le RICA IV est relié à l’extérieur par un ombilic. Ce fil long de plusieurs dizaines de mètres est le transporteur de la communication entre le robot et l’extérieur de la cellule. Il permet aussi aux opérateurs d’extraire le robot en cas de panne majeure. Comme un fil d’aspirateur, l’ombilic reste cependant souvent coincé dans des objets alentours ce qui peut potentiellement provoquer l’arrêt de la mission. Les robots pousseurs pourraient directement débloquer de l’intérieur l’ombilic sans intervention humaine.
Les contraintes de conception liées à l’environnement nucléaire
Il existe plein de scénarios possibles pour justifier l’utilisation des robots pousseurs. Cependant, le milieu nucléaire apporte son lot de contraintes dans la conception mécatronique des robots. En voici quelques exemples :
- Contraintes mécanique
Un design simple et des matériaux spécifiques
La conception mécanique du robot doit être simple et efficace pour en optimiser la maintenance. Les opérateurs sont dotés d’équipements de protection qui ne permettent pas de manipuler de trop petit objet. Le design doit être efficace pour augmenter la maintenabilité. De plus, RICA 3 utilise actuellement un matériau très spécifique : l’inox poly miroir. Ce matériau facilite le nettoyage du robot et augmente la protection aux rayonnements α, β et γ.
- Contraintes électronique et informatique
Irradiation des circuits électroniques, thermique et Intelligence artificielle
Nous savons que ces rayonnements et les circuits électroniques ne font pas bon ménage. Les pistes du circuit imprimé peuvent être endommagées si elles sont trop exposées à une source radioactive. Concernant la thermique, le robot est hermétiquement fermé pour empêcher les particules radioactives d’y entrer. Il faut toutefois dissiper la chaleur générée par les composants électroniques pour ne pas les endommager. Enfin, la collaboration robotique est encore actuellement un sujet de recherche. L’algorithme de coopération autonome en temps réel est complexe à développer et nécessite de nombreuses compétences.
En conclusion, les travaux menés sur les robots pousseurs nécessiteront beaucoup de recherches avant le grand saut dans une cellule aveugle. La conception de robots collaboratifs dans un milieu nucléaire ne sera pas chose facile. Néanmoins des premiers prototypes peuvent rapidement voir le jour et aider la recherche du démantèlement nucléaire. Actuellement le C.E.A a favorablement accueilli le concept et reste à l’écoute de nos propositions d’où notre récompense aux Awards des 4ème assises du démantèlement. Le projet « robot pousseur » a donc de beaux jours devant lui, surtout avec les efforts de notre deuxième promotion mécatronique.
Aucun commentaire:
Enregistrer un commentaire