Cet article fait suite à l’article portant sur les besoins et exigences du robot (https://projet-mecatronique-ema.blogspot.fr/2016/12/application-de-lis-pour-le-rica-iv.html).
Nous allons développer ici, les premières ébauches de notre système RICA d’un point de vue organique. C’est-à-dire, les organes et composants préliminaires du robot.
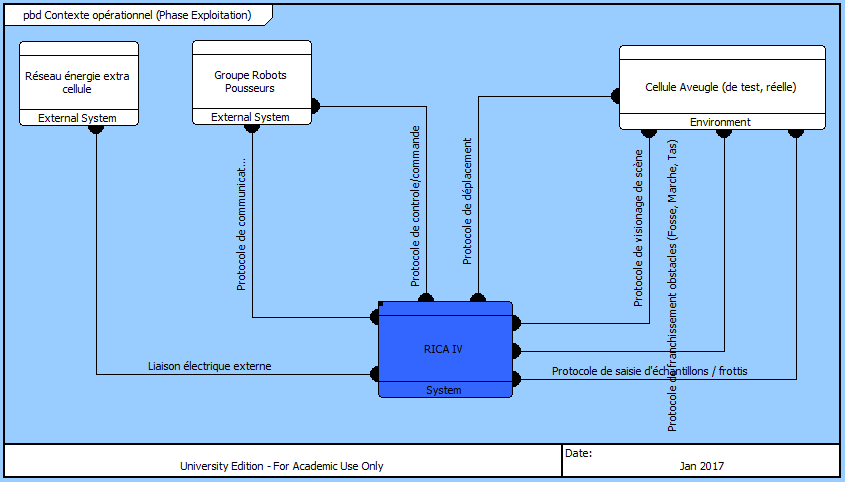
Fig.1 : Architecture organique du contexte
Nous observons sur la Figure 1, les différentes interfaces que le robot (RICA IV sur le diagramme) a avec son environnement, appelé environnement du contexte. Les connections, que l’on peut observer dans le contexte, sont d’ordre physique. Elles vont permettre de transmettre des flux d’informations ou autres. Nous développerons ceci, plus en détail, lors d’un futur l’article portant sur l’architecture fonctionnelle.
Dans ce diagramme, nous observons les différents liens avec les composants externes comme la cellule aveugle. Celle-ci doit nous transmettre, grâce à ces connections, des informations que nous pourrions exploiter avec le robot. Ces liens peuvent être assurés par des solutions matérielles ou des protocoles.
Fig.2 : Architecture organique du système RICA IV
Dans cette figure, nous observons les différentes connexions internes au système. Nous avons, ici, choisi d’inclure l’opérateur dans le système RICA IV. Ceci est justifié par son action directe sur le robot. Nous pouvons aussi observer comment l’ensemble des éléments du système est lié au robot. On remarque que l’ombilic joue un rôle essentiel. c’est lui qui assure une connexion physique et mécanique entre le robot et l’opérateur.
La décomposition est développée dans des strates inférieures, afin d’atteindre le niveau de détail le plus élevé possible. Cela va nous permettre, par la suite, de caractériser chaque composant, électronique ou mécanique du système.
Aucun commentaire:
Enregistrer un commentaire