Le robot Zumo :

Ils sont équipés de deux moteurs pas à pas couplés à des chenilles permettant un déplacement lent mais aisé sur tout type de surfaces. Néanmoins l’inconvénient de sa faible vitesse n’est pas préjudiciable dans notre cas car nous vous rappelons que le robot RICA IV se déplace très doucement.
 Ces moteurs sont reliés, tout comme les autres éléments présents dans le kit tels qu’un buzzer, un gyroscope ou encore une boussole, à une carte électronique sur laquelle nous avons incorporé directement une carte d’entrées/sorties (E/S). Cette carte, fournie par l’équipe pédagogique, à pour but de récupérer les informations des périphériques et ainsi pouvoir piloter les moteurs suivants les besoins.
Ces moteurs sont reliés, tout comme les autres éléments présents dans le kit tels qu’un buzzer, un gyroscope ou encore une boussole, à une carte électronique sur laquelle nous avons incorporé directement une carte d’entrées/sorties (E/S). Cette carte, fournie par l’équipe pédagogique, à pour but de récupérer les informations des périphériques et ainsi pouvoir piloter les moteurs suivants les besoins. Les Capteurs :
Une fois le robot monté avec sa carte d’entrées/sorties, nous avons dû l’équiper avec l’ensemble des différents types capteurs. Ceci permet à notre robot de comprendre l’environnement dans lequel il se trouve et de pouvoir l’interpréter au mieux.
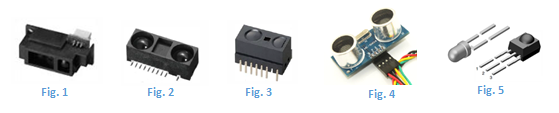
Les capteurs à notre disposition étaient les suivants :
1) Capteur de distance infrarouge analogique de plage de mesure 2 à 15 cm (fig. 1)
2) Capteur de distance infrarouge analogique de plage de mesure 10 à 150 cm (fig. 2)
3) Capteur tout ou rien (TOR) infrarouge courte distance (150 mm) (fig. 3)
4) Capteur de distance ultrasons analogique de plage de mesure 2 cm à 4 m (fig. 4)
5) Capteur infrarouge TOR avec distance de détection réglable (fig. 5)
La majorité des groupes ont décidé d’utiliser les capteurs N°1 pour détecter les autres robot sumos positionnés sur les côtés. Ils sont couplés 2 à 2 pour connaître le sens marche du robot à suivre et pouvoir rester aligné à ce même robot.
Les capteurs N°2 sont utilisés pour détecter la distance entre RICA IV et le robot sumos dans le cas où ce robot est le « maître » de l’essaim. Ils sont également couplés 2 à 2 pour les mêmes raisons expliquées précédemment.
Un capteur tout ou rien (N°3) placé devant permet de savoir si un objet se trouve ou non sur sa trajectoire.
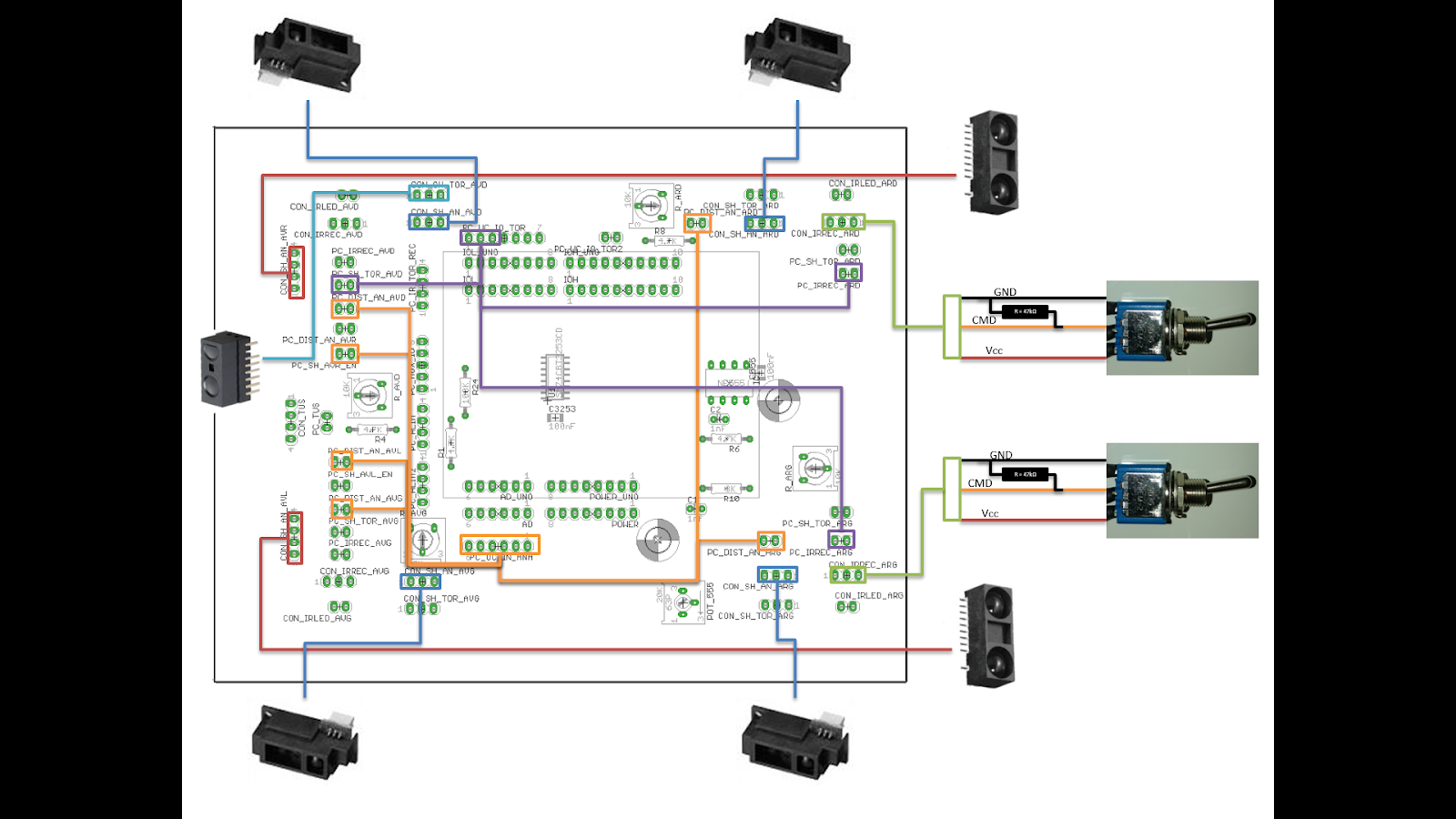
Figure 6 : Représentation du câblage des capteurs sur la carte d'E/s
Nous avons également ajouté deux interrupteurs, connectés sur des entrées non-utilisées, pour permettre de choisir le mode fonctionnement de notre robot. Comme vous avez pu voir dans l’article de présentation, les robot sumos pouvaient avoir 3 différents modes de fonctionnement RGP, RDP et RP. (Lien vers article de présentation : http://projet-mecatronique-ema.blogspot.fr/2016/12/presentation-du-projet-robot-pousseur.html)
Ainsi les combinaisons réalisées avec ces deux interrupteurs permettent au robot de savoir dans quel mode de fonctionnement il se trouve.
Un fois l’ensemble des capteurs reliés sur la carte d’E/S, nous avons connecté notre carte Arduino. Il ne reste plus qu’à piloter et configurer les différents ports de la carte Arduino. Le but est de récupérer les valeurs des capteurs et appliquer une commande en fonction des états et valeurs retournées par chacun des capteurs.
Le carénage :
Pour rendre notre robot plus robuste aux différents chocs qu’il serait amené à rencontrer dans les phases de tests et de validation. Mais aussi pour que chacun des robots soit détectable par ses homologues, chacun des groupes a choisi de réaliser une coque de protection pour le robot.
 Cette réalisation a permis de mettre en œuvre dans un cas pratique le cours de CAO (Conception Assistée par Ordinateur) que nous avions suivi peu de temps avant. Les problématiques de conception étaient simples: parvenir à se fixer sur la carte d’E/S présente sur le robot et intégrer les capteurs de manière à ne pas altérer leurs fonctionnements.
Cette réalisation a permis de mettre en œuvre dans un cas pratique le cours de CAO (Conception Assistée par Ordinateur) que nous avions suivi peu de temps avant. Les problématiques de conception étaient simples: parvenir à se fixer sur la carte d’E/S présente sur le robot et intégrer les capteurs de manière à ne pas altérer leurs fonctionnements.
De plus, la coque devait posséder une zone de réflexion pour les rayonnements infrarouges. Ceci étant indispensable pour que chaque robot puisse suivre son maître.
Tous les groupes ont réalisés leurs coques avec des imprimantes 3D présentes dans nos locaux. L’utilisation d’une telle technologie, nous a permis de réaliser rapidement des coques suffisamment résistantes pour notre utilisation à un coût dérisoire.
Dans un prochain article, nous allons détailler les manières dont nous avons géré le comportement des robots en fonction des situations auxquelles ils pourraient faire face.
Aucun commentaire:
Enregistrer un commentaire